Ikaros 4
Near-Space Balloon Mission
On April 11, 2013, Ikaros 4 took to the skies over the Central Valley of California.
Check out our livestream for our launch-day updates and photos.
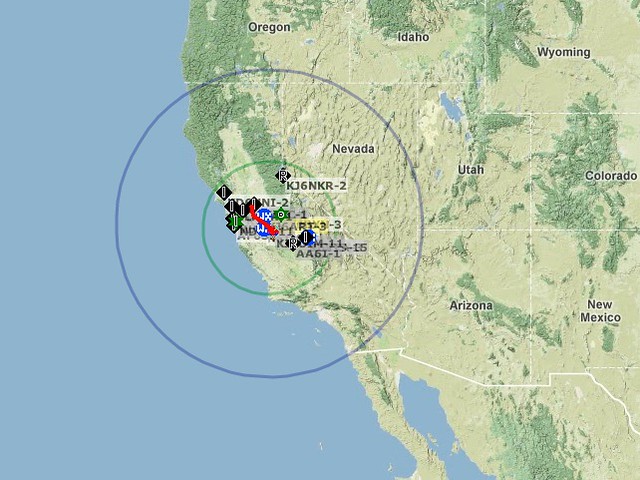
Maps showing Ikaros's flight path, APRS digipeaters it was received by, and the areas within Ikaros's line of sight (blue) and where Ikaros was more than 5 degrees above the horizon (green):

Photos and videos via flickr: Refresh page to update
Flight Info
- Launch Date
- April 11th, 2013 9:10 am
- Flight Duration
- 2 hours 43 minutes
- Ascent Time
- 2 hours 14 minutes
- Descent Time
- 29 minutes
- Distance Traveled
- 137.8 km (85.6 miles)
- Initial Ascent Rate
- 1.7 m/s (330 ft/min)
- Final Ascent Rate
- 5.4 m/s (1070 ft/min)
- Maximum Descent Rate
- 1679 feet in 11 seconds (46.5 m/s, 104 mph)
- Impact Speed
- 9.49 m/s (21.2 mph)
- Maximum Altitude
- 28309 m (92877 ft)
- Lowest Temperature
- -52°C (-62°F)
- Lowest Pressure
- 14 hPa (0.01 atm)
-Will B.
Project Details
Balloon and inflation

For launch, we used an Army surplus weather balloon that weighed 1470 grams, and filled it with enough Helium to lift about 10 Newtons of force. We ordered a Class A industrial Helium tank, and filled the balloon according to the final pressure of the tank. We determined that we needed 3.23 cubic meters of helium at sea level to lift our 1205g of payload and the balloon. The relationship we found to read this amount of helium as tank pressure was Ptf=Pti –((Vbf*Pa)/Vtf). Ptf is the target final pressure of the tank (in psi), Pti is the initial pressure of the tank (2070 psi), Vbf is the final volume of the balloon after filling (3.23 cubic meters) Pa is the outside pressure (14.7 psi), and Vtf is the volume of the tank (.0438 cubic meters.)
Because we second-guessed our calculation during inflation, worried the balloon wasn't buoyant enough, the final pressure in the tank ended up being 900 psi, which was a little bit lower than the calculated 985 psi. The extra helium probably resulted in the balloon popping prematurely. Nonetheless, the balloon reached 92,000 feet, but still fell slightly short of our 100,000 foot goal. The video below shows excerpts of the upward-looking camera footage, showing the balloon's expansion and burst, as well as the parachute wrapping around the parachute lines. -Luke
Parachute
The parachute was meant to slow down the module to 6 m/s (14mph) on its descent. To prevent the balloon and parachute tangling, we attached them to opposite ends of a line which runs through a ring which is also attached to the line that the payload hangs from. We built the parachute of 8-triangle pieces with the hypotenuse slightly curved and 4 curved squares. We used a parachute silk that was light (45 g) to make a slightly smaller version of the heavy-duty TAC-1 parachute we bought for Ikaros II. Unlike in Ikaros II and III, when the balloon popped, most of the latex stayed attached. Unfortunately, the parachute did not fully pull the balloon remains down and the balloon wrapped around the parachute leads. However, the design was able to capture the air even when twisted and slowed the descent to about 20 mph. The bright orange color made it easy to spot from a distance, which was useful since the hard impact prevented the landing position from being transmitted. -Keith
Video
On-board cameras consisted of two 808#3 keychain cameras from previous flights and two new 808#16 HD keychain cameras. We replaced the batteries of all four with a larger version of the original LiPo batteries so they would record longer. All four cameras lasted until after burst, and the ground camera recorded until after landing. A GoPro took more than 6000 still images of the flight.

Tracking
For ikaros 4 we used the same tracking system as last year. We had an arduino with a trackuino shield and a sensor shield. The computer took input from the GPS and sensors, and grouped them together in a packet which was them transmitted via Ham radio to our radio and APRS repeaters which then relay that data to the internet where it could be viewed. When the payload hit the ground faster than expected, the batteries were knocked out of their holder, so we did not get an exact landing location and had to find it visually in the area of the last transmission from 580 meters. -Nolan
Data collection
Atmospheric data
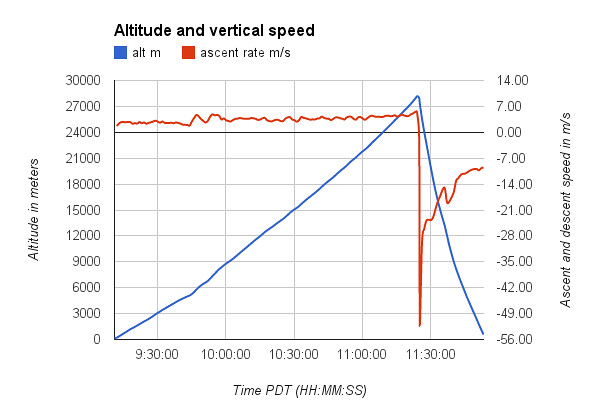
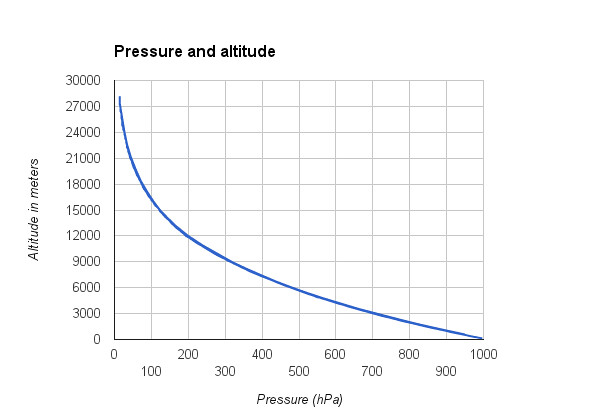
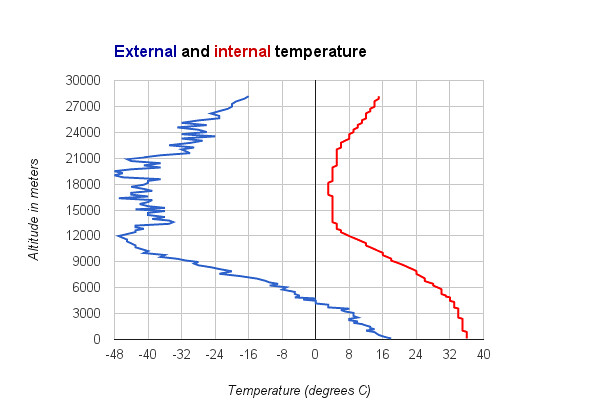
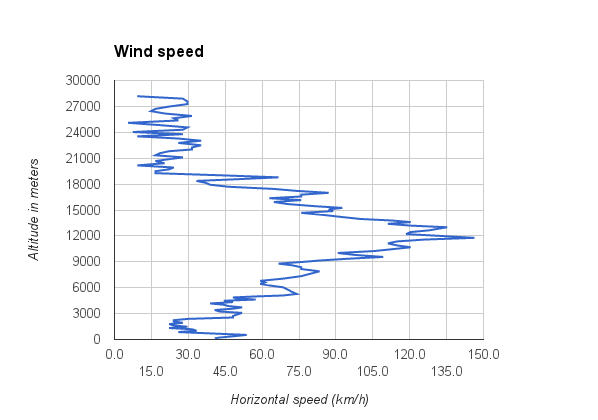
Both the tracking and science computers measured pressure and internal and external temperature. Unfortunately, we were unable to get the science computer to record GPS data at the same time as controlling the servo that opened the bacteria collection device and recording to the SD card. There were also issues with the temperature sensors and clock, so the best data was collected and transmitted by the flight computer. The graphs below summarize this data.
Bacteria collection
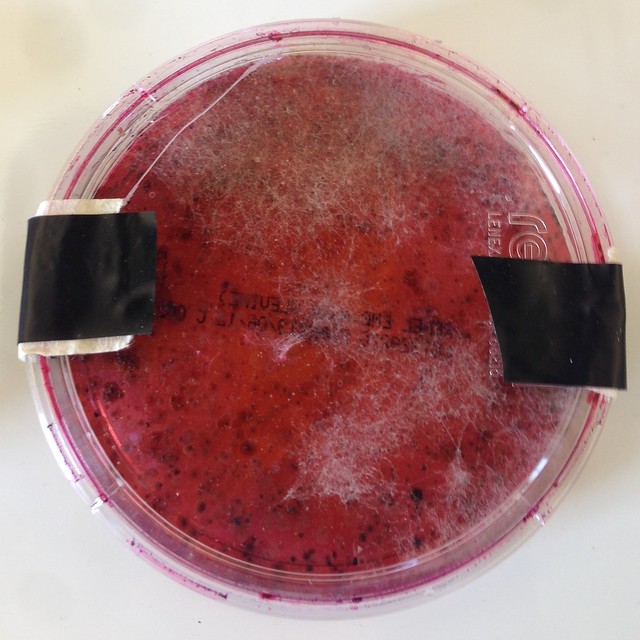
To test the hypothesis that there are bacteria present in the upper atmostphere that can seed cloud formation, we built a device to open a petri dish to collect a sample to culture. We had it set to open specifically above the Planetary Boundary Layer where most of the mixing from the ground occurs. It was meant to stay open from 12,000 ft to 40,000 ft and one of the video cameras showed that the device opened and closed at the correct altitudes based on atmospheric pressure. (Unexpectedly, the code caused the device to open and close repeatedly instead of just staying open, but this glitch wouldn't have mattered.) Unfortunately, when the payload hit the ground faster than expected, the batteries were knocked out of their holder. When the device lost power, it did not stay closed, and the experiment was contaminated. We did, however, get a good sample of the bacteria and fungus living on the ground in a pomegranate orchard!
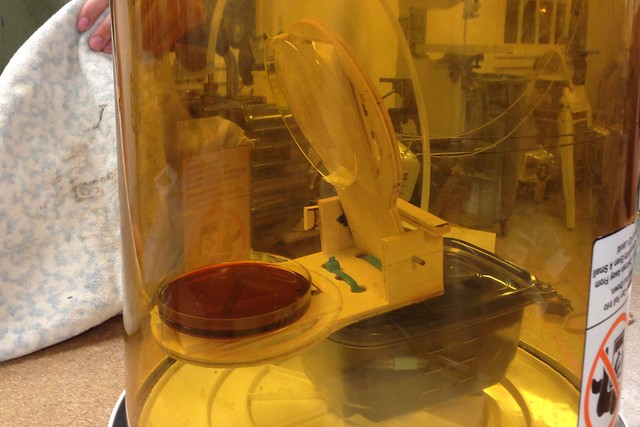
Below are images of the bacteria collection device being tested in the vacuum chamber and where it landed, along with the petri dish after incubation.

Launch site
When looking for a spot to launch Ikaros 4 we had to take many aspects into account. In the beginning we were tempted to launch from the recreation area of our school. The benefit of this was that the school would provide a shield from the wind, as well as we would be close to our tools. However after a few tests, such as using a party balloon with similar lift as well running simulations that would predict the landing zone (using Habhub) we soon realized from the test balloons that would not be able to successfully launch, as the balloon could be slammed into the ground. Also with HabHub predictions we realized that our balloon would have a high chance to land in the ocean. With this in mind Ikaros 4 was launched along South Wing Levy Road, which is few miles west of Stockton, California. The reason why we launched in this area was the remoteness of the area, looking around there were no houses, trees, or people for miles. Along with this, the lack of mountains nearby helped in choosing that as our launch site. Though we did not have that much control over were the balloon landed (aside from looking on Habhub to see an approximation on where it could land) the landing zone that the balloon did land in was very good. The Balloon landed near Button Willow Slough, east of Firebaugh, CA; This area, a pomegranate farm, made a good landing location as it was close to a road, making the trek to the balloon easier than if it had landed in the mountains. Along with this the lack of tall trees in the area made it so that once the balloon landed we could retrieve it. The distance between the launch and landing site was 85.60 miles. -Will H.
Ikaros Home Page