Ikaros 3
Near-Space Balloon Mission
On April 11, 2012, students from The Bay School launched and recovered a third near-space balloon, from Rye Patch State Recreation Area in northern Nevada.
Check out our livestream for a record of updates from launch day.

Photos and videos via flickr:
Flight Info
- Launch Date
- April 11, 2012 9:29 am
- Flight Duration
- 2 hours 14 minutes
- Ascent Time
- 1 hour 39 minutes
- Descent Time
- 35 minutes
- Distance Traveled
- 121 km (75 miles)
- Initial Ascent Rate
- 4 m/s (787 ft/min)
- Final Ascent Rate
- 6.5 m/s (1280 ft/min)
- Maximum Descent Rate
- 4005 meters in 1 minute (66.7 m/s, 147 mph)
- Impact Speed
- 6 m/s (13.5 mph)
- Maximum Altitude
- 29,264 meters (96,011 feet, 18.2 miles)
- Lowest Temperature
- -45°C (-49°F)
- Lowest Pressure
- 11hPa (.01 atm)
Project Details
Balloon and inflation
We are using the same balloon and inflation system as last year. In an attempt to get to a higher altitude than in the past, we are using less helium. Less helium means less lift, but it also means it will be able to expand more and get higher before it stretches the balloon to the breaking point.

Parachute
The Parachute apparatus comprises several different parts. The foundation for the parachute basket is a plasticware container with the bottom cut out.The ripstop Nylon 36-inch parachute is held in it while the balloon pulls it up.

A line runs from the balloon down to the the parachute through a grommet on the side of the container, so while the balloon is going up, the parachute is held to the top of the container.
Once the balloon pops, air comes though the bottom of the container, pushing the parachute out and the remains of the balloon are pulled towards the grommet. The actual payload is attached to a secondary grommet on the bottom of the container.
On launch day for Ikaros III, when winds picked up, the parachute wouldn't stay in the basket, so we had to release the balloon with the parachute deployed. This may have slowed our ascent somewhat, but once the balloon burst, the parachute pulled the balloon remains down as expected.
Video
To record the ascent and descent of the balloon we are using several small cameras.

One of our cameras has a filter in front of it that only lets in IR light because we thought it would be interesting to capture the world in infra-red from near-space. Our other cameras are for recording the balloon from below, recording the horizon, recording the other payload box, and recording the ground in true colors. The cameras are MiNi DV and 808 #3 Keychain cameras, and the IR camera is a MiNi DV, with. The keychain cameras are powered by packs of three AA batteries, and have their original batteries taken out. (The cameras are connected to the battery holder by a 9v style connector). Connecting three cameras to the same battery pack did not work, unfortunately. Surrounding the entire array of cameras and their power sources is sound dampener ester foam, for insulation from the cold, and for impact protection. When assembled, the foam is encased in a plastic-ware container. For recording, we are using four 16GB micro SD cards.

Tracking and Data collection
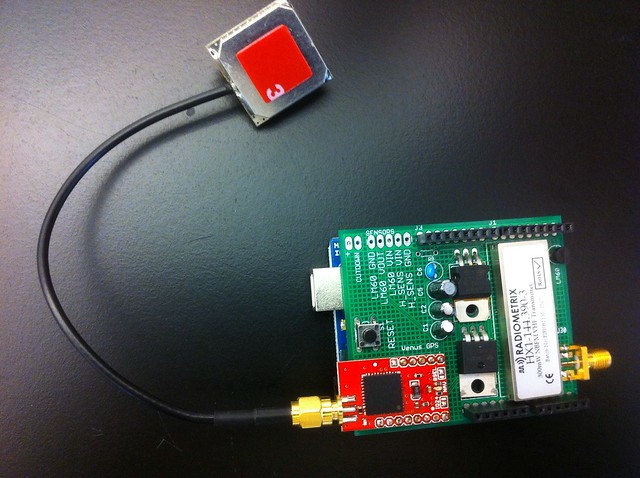
To track our balloon, we built a Trackuino shield, and a datalogger shield, to attach to an Arduino Uno, with a J-pole antenna.
Our first J-pole was designed similarly to the one in this diagram, but we created another one because our first attempt was not working well enough. After learning that the 300-ohm twin-lead we were using has a velocity factor of 0.82, we created a second, shorter antenna to better match the wavelength. Using a standing wave ratio meter, we found that it was TOO short, and we ended up tuning the first antenna to an SWR of 1.1:1 at 144.390 MHz. We also made a new, lighter version of the quarter-wave ground plane antennas used on Ikaros I and II, but decided not to use it because it was heavier and more fragile than the J-pole.
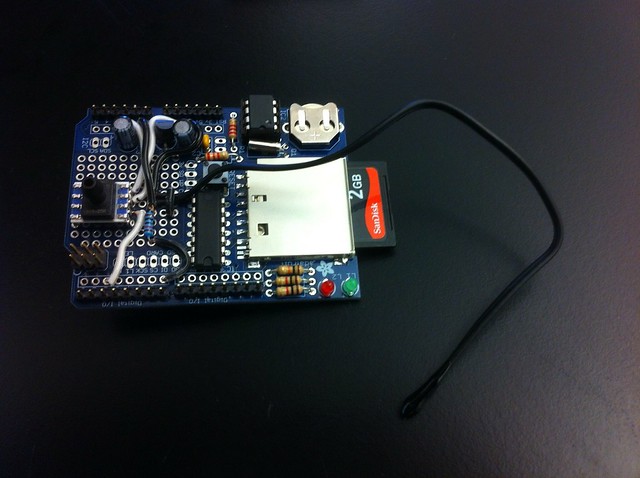
The flight computer is an Arduino Uno. This board on the bottom of the stack runs the code and controls the other shields.

On top of this is an SD card shield. Because of the RAM constraints of the Arduino Uno (2Kb), this isn't recording data right now, but we attached external temperature and pressure sensors to it so it can transmit sensor data to repeaters on the ground which connect to the internet.
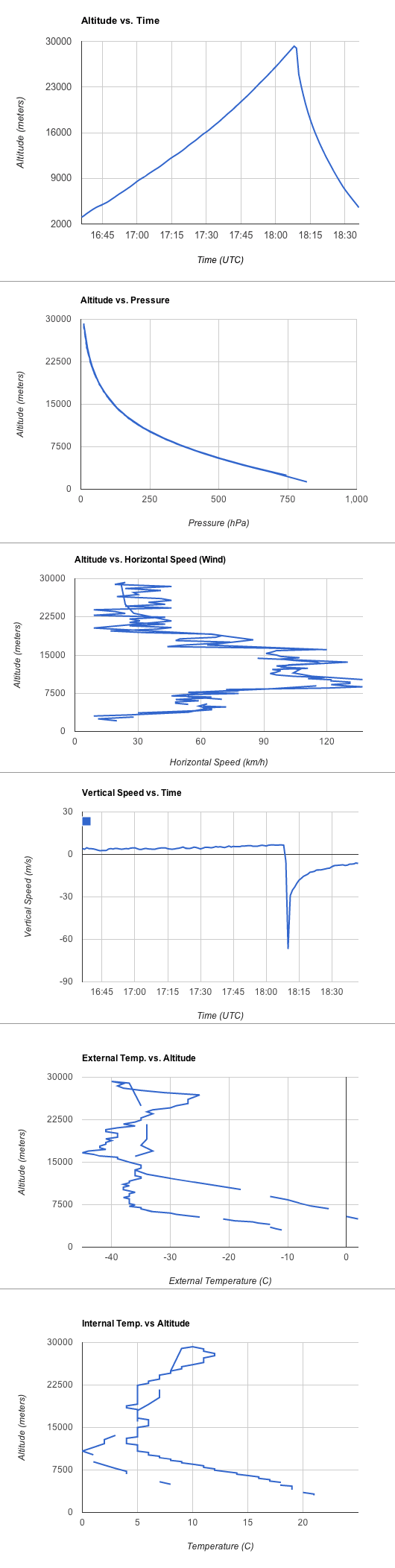
Graphs of data transmitted:
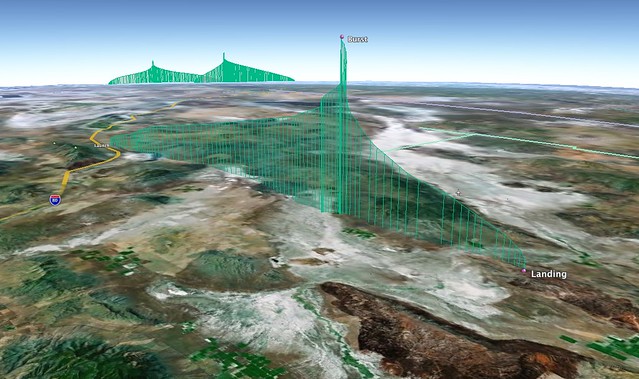
Launch site
Ikaros III was launched from public land just outside Rye Patch State Recreation Area. It landed northeast of the Black Rock Desert.