Project Rahu
Eclipse Observation Balloons
On August 21, 2017 we launched four camera-equipped weather balloons from NW of Madras, OR into the path of the total solar eclipse. Our goal, besides experiencing the eclipse on the ground, was to see what the complete umbra looks like from above most of the atmosphere, something only a handful of photographs had been taken of prior to this eclipse.
After months of prep, we released our balloons at 7:28 (Rahu I), 7:34 (Rahu IV), 7:40 (Rahu II), and 7:48 (Rahu III). We recovered equipment from all four balloons, though trackers from Rahu II became separated from the rest of the payload, so we lost those four cameras. Below is information about the components of the project and how the expedition went.
- Temporary information page with details about our test flight and preparation for launch in Oregon
- Ikaros Home Page: information about previous Bay School balloon projects
- Bay School website
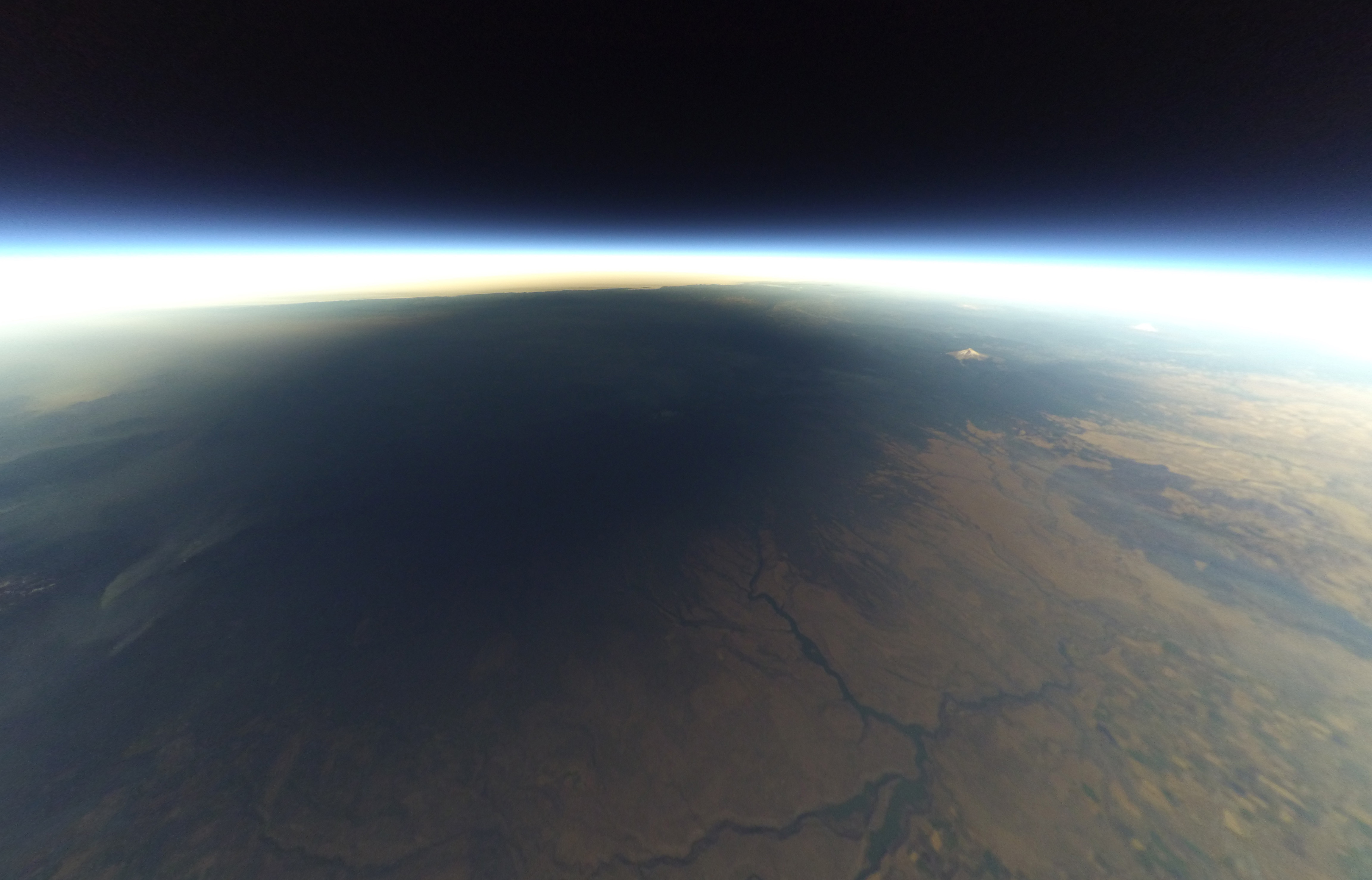
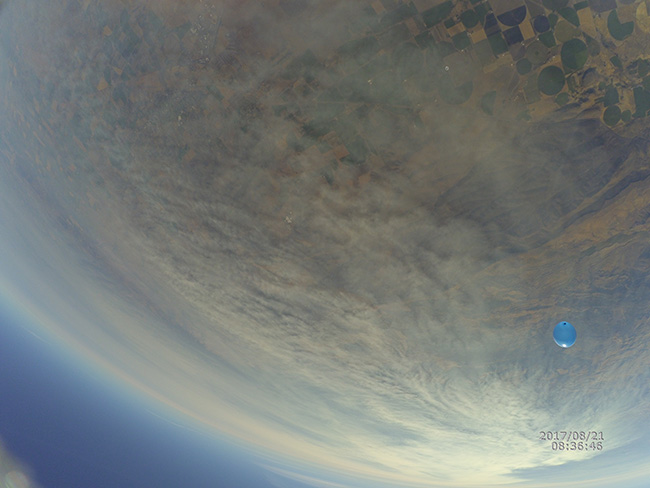
View of the shadow of the eclipse approaching from the Oregon coast from Rahu IV at 83,000 feet at 10:16am.
Rahu I at 86,000 feet is just visible as a tiny speck of white over the shadow.

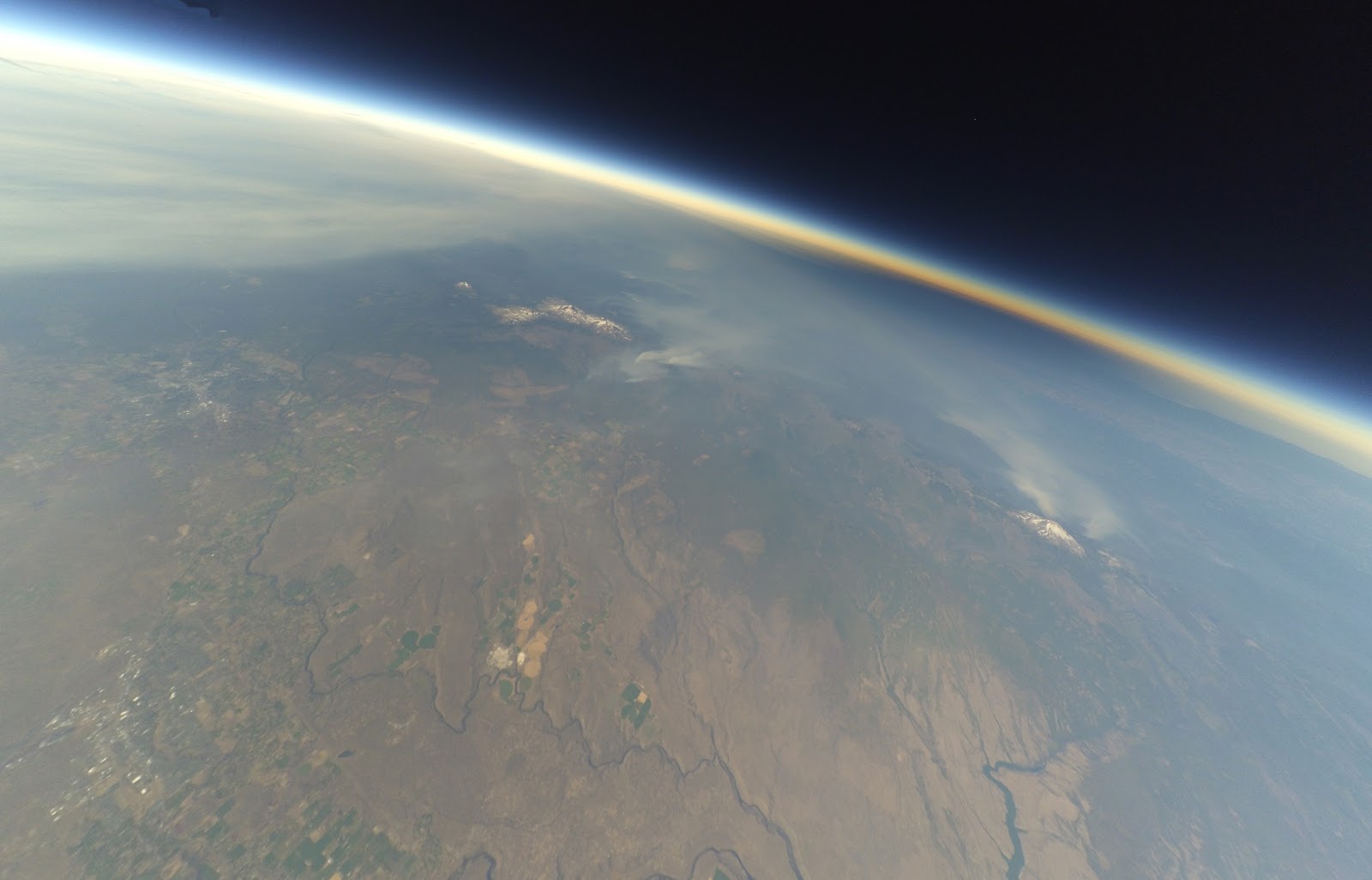
Umbra engulfing Mt. Jefferson at 10:18am from Rahu IV.
Mt. Jefferson completely in the shadow at 10:18 from Rahu I.
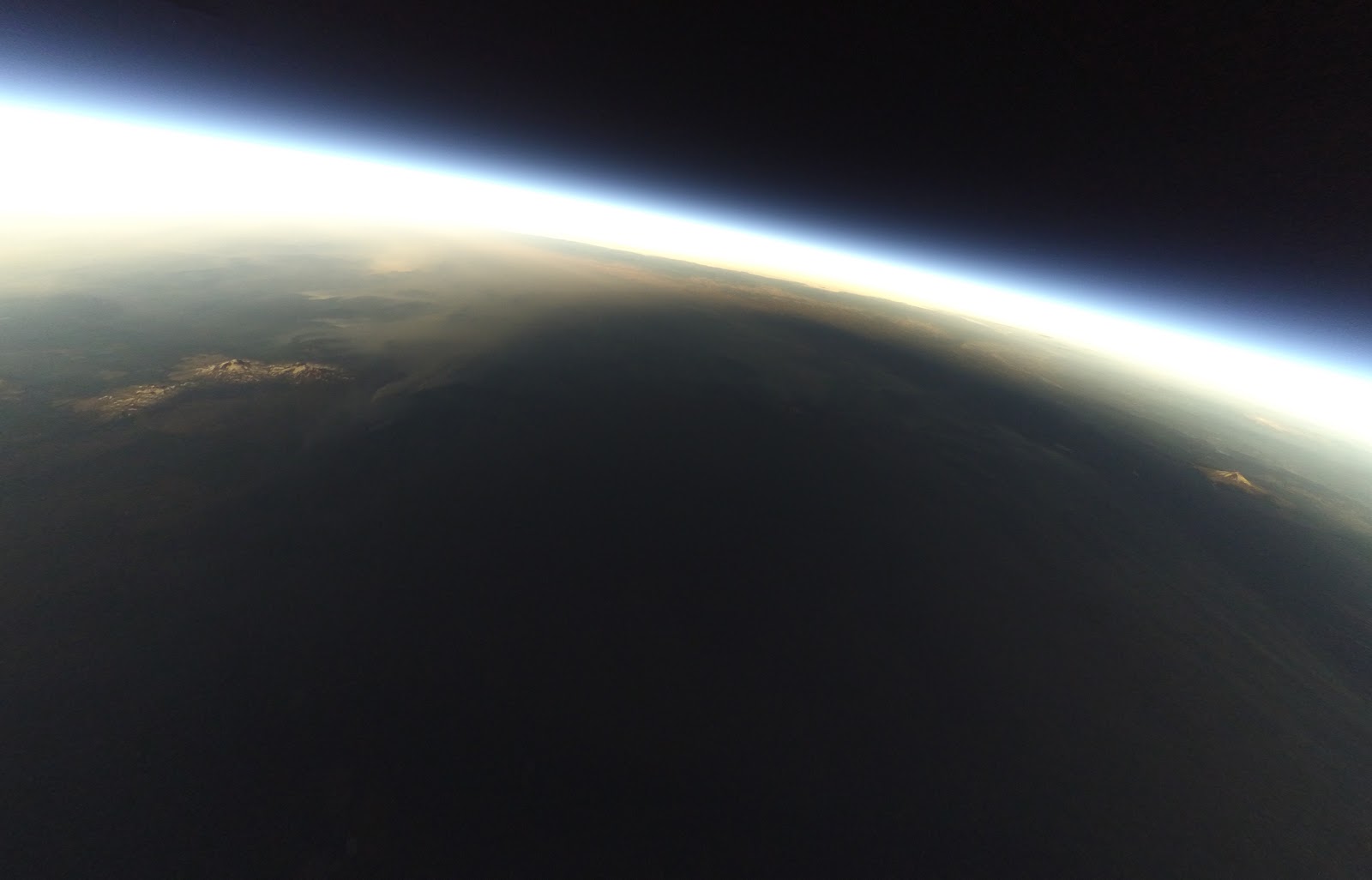
The eclipse completely filling the space between the Three Sisters and Mt. Hood.
Mt. Jefferson is in complete darkness at 10:19.
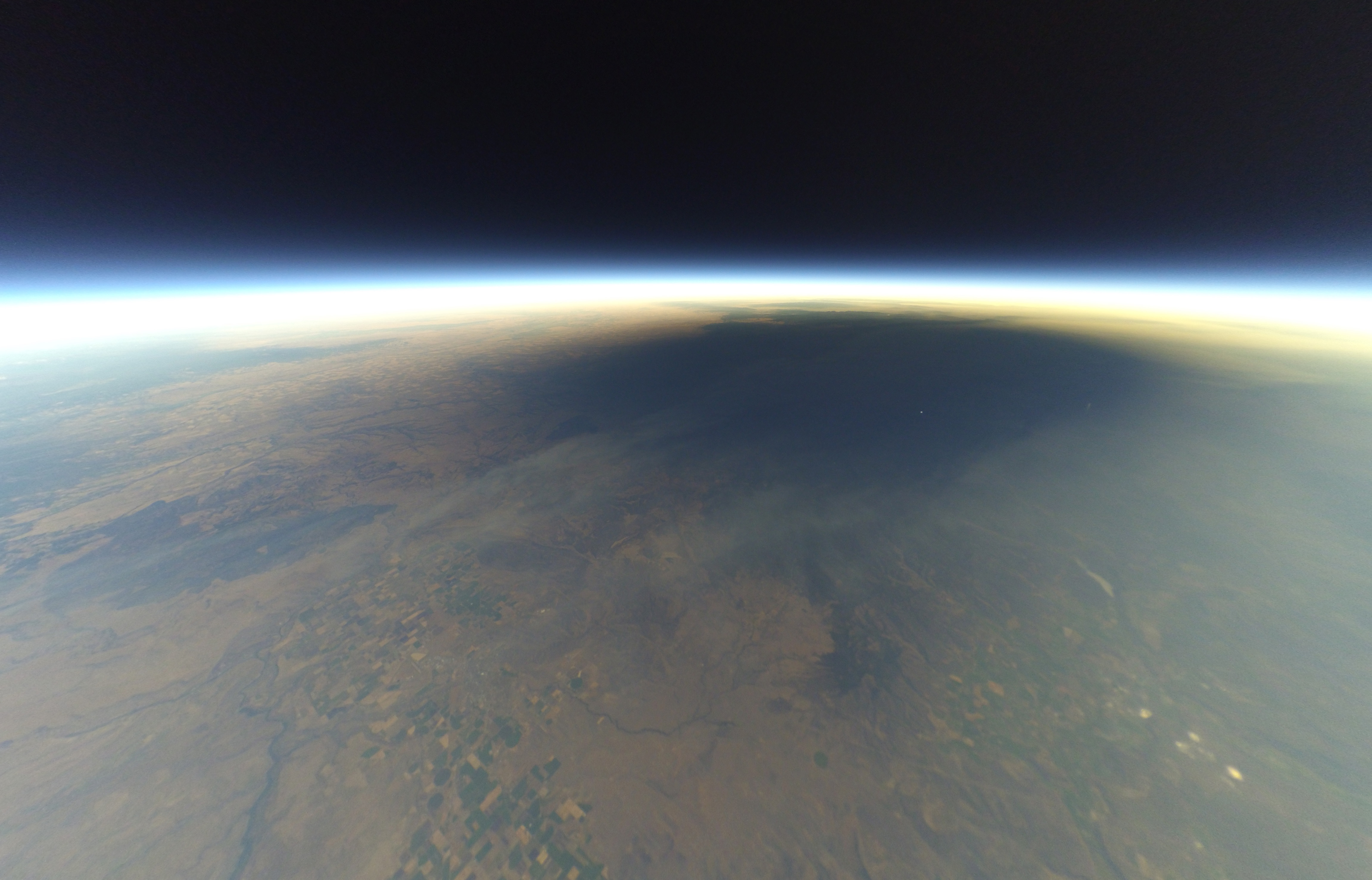
View of the shadow of the eclipse receding from Rahu I at 90,000 feet at 10:23am.
Rahu IV at 87,000 feet is clearly visible as a white dot in front of the shadow.
Flight statistics
Rahu 0 (Test) |
Rahu I |
Rahu II |
Rahu III |
Rahu IV |
|
Release time |
11:37 Aug 3 |
7:28 Aug 21 |
7:40 Aug 21 |
7:48 Aug 21 |
7:34 Aug 21 |
Burst time |
2:38 |
11:00 |
11:16 |
11:20 |
10:57:40 |
Landing time |
3:16 |
11:40 |
11:44 |
11:41 |
11:44 |
Ascent time |
3 hr 1 min |
3 hr 32 min |
3 hr 36 min |
3 hr 32 min |
3 hr 23 min |
Descent time |
38 min |
40 min |
28 min |
21 min |
47 min |
Total flight time |
3 hr 39 min |
4 hr 12 min |
4 hr 4 min |
3 hr 53 min |
4 hr 10 min |
Distance |
54 mi |
30.5 mi |
28.4 mi |
26.8 mi |
28.4 mi |
Initial ascent rate |
613 ft/min |
461 ft/min |
379 ft/min |
481 ft/min |
470 ft/min |
Final ascent rate |
544 ft/min |
238 ft/min |
352 ft/min |
325 ft/min |
512 ft/min |
Max descent rate |
4521 ft/min |
7115 ft/min |
4306 ft/min* |
7339 ft/min |
6476 ft/min |
Landing speed |
1185 ft/min |
1319 ft/min |
2696 ft/min |
2629 ft/min |
1283 ft/min |
Altitude during eclipse |
N/A |
88781 feet |
77713 feet |
75222 feet |
85699 feet |
Max altitude |
103045 feet |
107707 feet |
105581 feet |
105981 feet |
105354 feet |
Lowest internal temp |
14ºC @ 57000ft |
-30ºC @ 92000ft |
-26ºC @ 81000ft |
-28ºC @ 78500ft |
-32ºC @ 88000ft |
Lowest pressure |
1502 Pa |
836 Pa |
995 Pa |
1102 Pa |
1154 Pa |
*Average descent rate from burst to first transmission received 15 minutes after burst.
Project Details
- Talks
- Balloon
- Helium and inflation
- Parachute
- Cameras
- Power
- Tracking systems
- Enclosure and chassis
- Launch site
- Flight
Talks
David talks about the role of failure in Project Rahu:
Craig talks about the role of ambition and preparation in Project Rahu:
Balloon
The ~720g payloads were carried by 1000g Kaymont balloons. There are a few competing factors in selecting a balloon size. For a given payload mass, a larger balloon will rise higher because it can be under-inflated so that it won't expand to its burst diameter till it reaches a higher altitude. Even so, a less inflated larger balloon requires more helium to lift its own additional mass. Both the additional helium and larger balloon increase the cost. We took the risk of buying discounted Kaymont weather balloons on Ebay which were probably expired.
The test balloon burst at a lower altitude than we were expecting based on Kaymont's data sheet leading us to target lower altitudes for our balloons to be at during totality. The eclipse day balloons performed closer to Kaymont's numbers. In retrospect, we could have moved up our launch schedule by half an hour and gotten imagery from around 10,000 feet higher. Because the mass of the payloads was so close to that of the balloons, the ascent rate was much slower than any of the Ikaros balloons. We were unable to reduce the payload mass without removing equipment we had decided was vital. Given the payload mass, reducing the helium further to get an even higher altitude would have required launching even earlier in the morning and would have given the balloons more time to drift south of the eclipse zone. And since we were unable to do additional test flights using less helium, this also might have created some risk of turning the balloons into "floaters" that goes up so slowly that they stall before getting high enough to burst.
Helium and balloon inflation
We settled on Q size helium tanks holding ~83 cu. ft of helium because the small size made them feasible to move and transport with only two people. They also held just a little bit more helium than needed for one balloon, so we were able to assign one tank to each balloon and not worry about switching tanks during inflation. David constructed a wooden frame to hold the tanks. It was somewhat cumbersome to get the tanks into the "six-pack" due to the height of the van ceiling, but it allowed the tanks to be strapped to the van during transport.

The most significant innovation in the project was constructing inflation "tents" for each of the balloons, inspired by JP Aerospace. This made it possible for two people to handle the launches. Sewing the tents was by far the most time consuming part of the project; each tent took at least 12 hours of labor. But having four tents allowed us to inflate all four balloons in advance and then release them in rapid succession. We would not have been able to have four balloons above 75,000 feet during the eclipse if we had had to use an inflate-launch-inflate-launch sequence. The tents were held in place by placing water jugs or sand bags inside the corners. Though we were lucky to have almost windless conditions for both the test launch and eclipse day, the tents were intended to help restrain the balloons in some amount of wind, which had been a serious issue with Ikaros III.

Testing the first balloon inflation tent
We originally intended to determine the amount of helium going into the balloons based on a reading of the tank pressure. But, perhaps due to the hot weather, the pressure regulator squeeled loudly during inflation of the test balloon, and the needle on the pressure guage vibrated itself loose and fell off. Fortunately, we had calculated the size of the balloon in terms of an arch going from the ground, over the top of the balloon, and back to the ground that we could measure with a tape measure as a back up. This method seemed satisfactory and was pretty easy, so we did not replace the regulator guage and used the tape measure method for the real launch. During inflation on eclipse day, we realized that we hadn't factored in the effect of the temperature drop of the helium as it came out of the tank on its volume and were worried we were overinflating. We erred on the side of a little less helium on Rahu III as a result, but otherwise haven't revisited this issue.

Payloads and inflation stations laid out and ready to go before dawn on launch day

Filling the first balloon with helium

Going through final checklists after all four balloons were inflated
One final thing to consider with the balloon inflation bags: we have found that high purity helium leaks out of party balloons much faster than "balloon helium" that contains a signficant amount of nitrogen. Some leakage during flight is probably beneficial, allowing the balloon to ascend quickly at first but also burst at a higher altitude. However leakage could be an issue if a balloon were inflated and sat long enough to lose a significant amount of helium before being released.
Parachute
We used 3-foot ripstop nylon parachutes tied to the opposite end of a line from the balloon on the other end. This line passed through a ring that had the line to the payload tied to it. At launch, the parachute is pulled taut to this ring. In theory, at burst, the parachute will catch and drag while the payload and remains of the balloon fall. The payload will then slide down the parachute-balloon line or the balloon remains will be pulled down to the ring. While this arrangement sometimes seems to work, as often as not the parachute hasn't pulled the balloon clear and the balloon has gotten tangled with the parachute. The more usual parachute inline between the payload and balloon can also tangle, so it might still be worth refining this arrangement. A key part of the rigging is the use of fishing swivels at connection points to prevent rotation as a result of string winding.
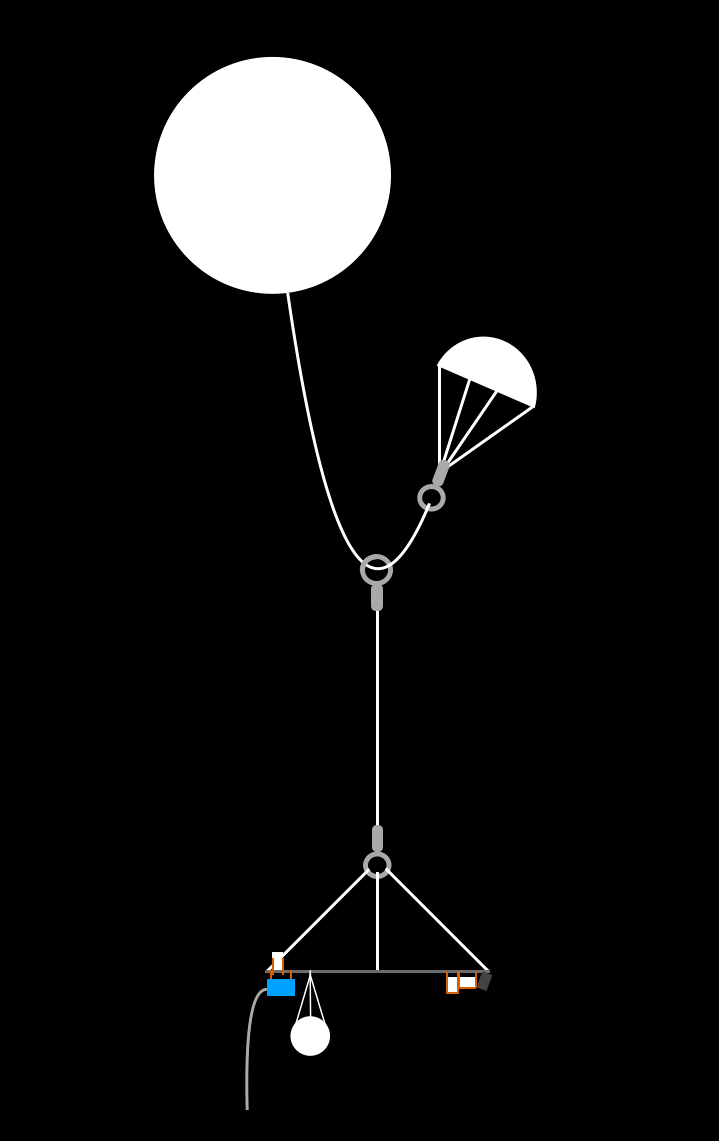
Diagram of the balloon-parachute-payload arrangement--not to scale
Something we tried with these balloons was loosely packing the parachute in a lightweight bag and inflating a party balloon inside the bag. The idea was to prevent the parachute from slowing the payload during the early part of ascent, as we saw happen with Ikaros IV. We expected the party balloon to burst allowing the bag to fall off of the parachute before it was needed.
On the test flight, the balloon stayed tenuously in the bag for nearly two hours. When it did pop out, the parachute stayed in the bag until burst. Though that doesn't seem to have been the cause of the parachute failing to inflate for the first 12 minutes of descent and tangling with the balloon remains, for the main flights, we used a larger compostable bag that would fall off more easily. The design then worked as expected. On Rahu I, The balloon burst about an hour into the flight. It took about 30 seconds more for the bag to fall away (though the party balloon actually sat in the parachute until the main balloon burst.) On Rahu III, the balloon and bag coincidentally disappeared in the two-second gap between 20-minute video segments an hour and 20 minutes into the flight. On Rahu IV, the balloon popped out of the bag, and both fell away about an hour into the flight.
While the parachute bags worked as designed, it's not clear that it was actually beneficial. None of the parachutes inflated once released. It's possible that the balloons were ascending slowly enough that even in the thicker ground level air, the parachutes wouldn't have inflated or caused significant drag.
Cameras
The primary payloads were Xiaomi Yi cameras for stills and 808 keychain cameras for video, both with supplemental batteries. Though for these once-in-a-lifetime flights it might have been worth risking more expensive, higher-quality cameras, these are good low-weight, inexpersive options.
Power
For weight and low temperature performance, all components were powered by either Energizer Lithium AA batteries (tracking) or rechargeable LiPo batteries (cameras.) High altitude balloons experience extremely cold temperatures, so lithium batteries that can operate down to -40º make sense, especially given that they are also lighter than alkaline or NiMH batteries. It doesn't actually take that much insulation to keep components warm inside on most balloon flights, since there is little conduction to the thin atmosphere, but during the eclipse there was little solar radiation to help keep the electronics warm. The internal temperature on the eclipse balloons was much lower than during the test flight, so lithium batteries were especially important.
Tracking
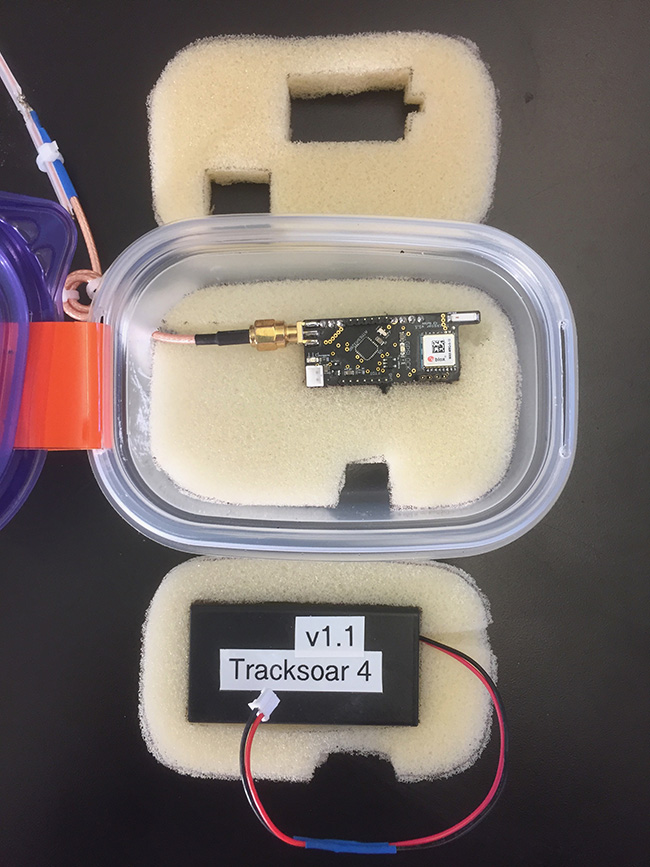
Our primary tracking was done via Tracksoar APRS transmitters, designed by Mike Bales. The balloons transmitted on 144.39 as KJ6DYP-11, KJ6DYP-14, KJ6DYP-12, and KJ6DYP-13. We constructed light-weight SMA connector J-pole antennas out of some vintage transparent twin-lead I found on ebay a number of years ago (for COLOR television!)
Backup satellite tracking was by Spot Trace. While the Spots ultimately did give us landing locations, the devices do not transmit continuously and went to sleep after being carried to the launch area the night before. We were disconcerted to find that they were not transmitting immediately after launch. We later learned that the release and flight were not enough motion to wake them.
We did not expect them to report locations above 60,000 feet, but they did wake up when they started falling and began transmitting once they fell below 60,000 feet. Spot has provided a firmware update that increases the sensitivity to motion, though we have not yet tested it. Unfortunately, they cannot be set to transmit continuously when stopped, but, we've learned, can be set to transmit once a day, even if stationary, which would be helpful if a payload failed to be picked up by the satellites immediately after landing.
You can see the tracks of all of our balloons online via APRS.

Enclosures and Chassis
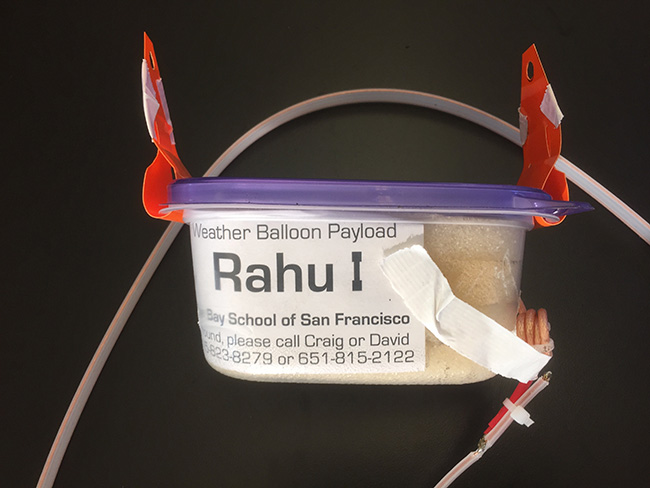
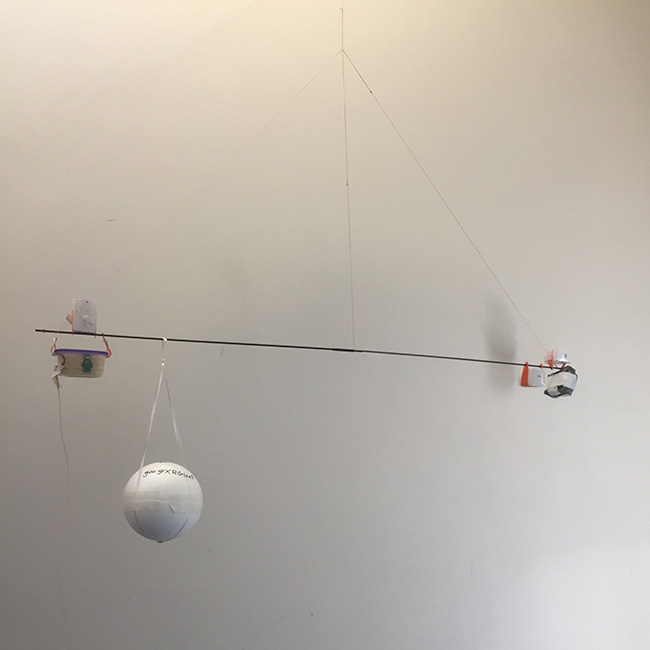
All payload components were protected from cold and impact by enclosures than included foam. The Tracksoar APRS board was housed in several custom-cut layers of open-cell foam in a small Gladware style food container, hanging from the boom.
In order for it to contact satellites, the Spot Tracker needed to be oriented upright after landing. After several prototypes for gimbal-type devices that proved unreliable, we settled on housing it in an 8-inch styrofoam ball. The weight of the tracker in the bottom of the ball reliably caused the ball to right itself. Even if it came to rest upsidedown, the ball would hold the tracker off the ground, increasing the chances of the signal being picked up by the satellites. Though we didn't test it thoroughly, the styrofoam was buoyant enough to prevent the payload from sinking in case of a water landing. The spot tracker is waterproof as well, so there would be a possibility of locating the payload even if it landed in a lake or river. Though most of the electronics would be ruined, data can often be recovered from SD cards after submersion.

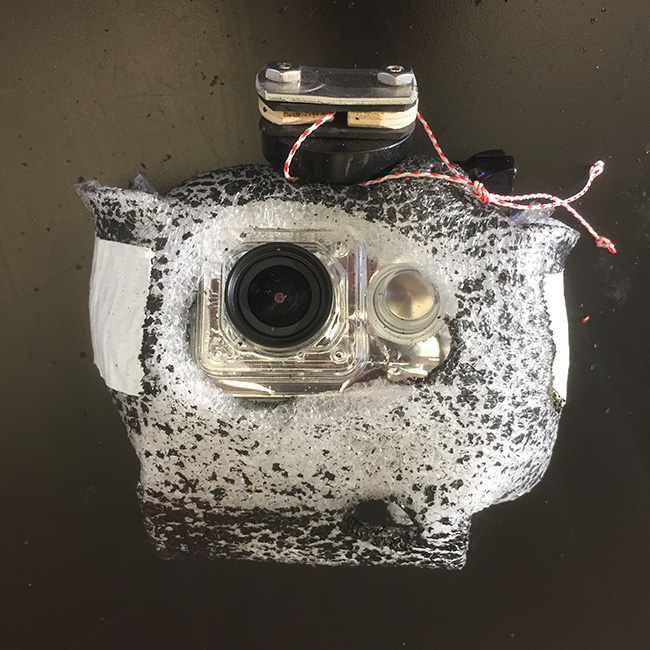
The 808 cameras were housed in the foam packaging they were delivered in, modified so the lens would protrude. This surrounded by a box made of laminated paper. This lightweight solution should be tried for the APRS as well.
On the test flight, we only used a standard plastic case for the Yi camera and its supplemental battery. This had worked fine with GoPros on prior flights, but the camera had two issues. First, ice accumulated on the inside of the glass in front of the lens. It was concentrated in a ring that corresponded with the gap between the case and the camera, suggesting that the air inside the case seeped out around the glass panel, leaving moisture on the glass as it moved. To eliminate this, we simply unscrewed the glass and left the lens exposed. This, however, seemed like it would exacerbate the second problem: the camera shut down only an hour and 37 minutes into the flight due to cold. After using a blanket-wrapped high-insulation cooler and dry ice to test solutions at sub-zero temperatures, we finalized a somewhat make-shift foam wrapping spray-painted black to absorb sunlight (even though it would be limited during the eclipse) along with a layer of mylar inside the camera case to insulate the cameras. All three Yi cameras functioned through totality but stopped shooting before the end of the flights.
All of these components were attached to a meter-long carbon-fiber boom intended to be a kite strut. Distributing the weight toward the ends of the boom increases the rotational inertia enough to greatly reduce spinning. Since we didn't have cameras facing 360 degrees, some rotation was helpful, but a spinning payload produces unwatchable video. We also hung the payloads about 30 feet below the balloon. Though the weight of the string is non-negligible, a longer line gives less angle and a longer period to the pendulum that is the payload. This also reduces motion in video.
The biggest problem the balloons experienced was that two of the payloads partially came apart after burst. The line to the tracker end was looped around the boom and taped to the sides of the upward-facing camera, but not knotted. On Rahu II and III, we suspect that this connection came loose, either in the chaos of burst or as a result of a fast descent from the parachute tangling with the balloon. The video from Rahu III shows the balloon tangling with the payload immediately after burst and that the boom was oriented vertically rather than horizontally as it fell. The APRS module tore free from the rest of the payload, landing a few hundred feet away.
Only the APRS and Spot trackers from Rahu II were located, so we don't have photographic evidence of exactly what happened. Presumably, the line came loose and the trackers slid off the end. The Rahu II APRS tracker had a longer descent time than Rahu III's payload and neither transmitted during the first half of their descent, so it's not clear whether the demise of Rahu II was exactly the same as what went wrong with Rahu III. Regardless of the details, the lesson is to tie everything securely.
Launch site
We camped and released our balloons on public land in the Crooked River National Grassland. By eclipse morning, there were scores of other people camped on the ridge, some of whom watched our balloon inflation and release.

Flight
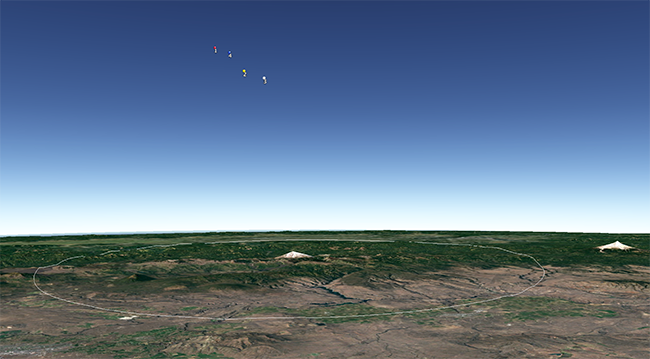 Visualization of the location of the four balloons over the umbra. Taken from interactive 4D flight path map for Google Earth.
Visualization of the location of the four balloons over the umbra. Taken from interactive 4D flight path map for Google Earth.
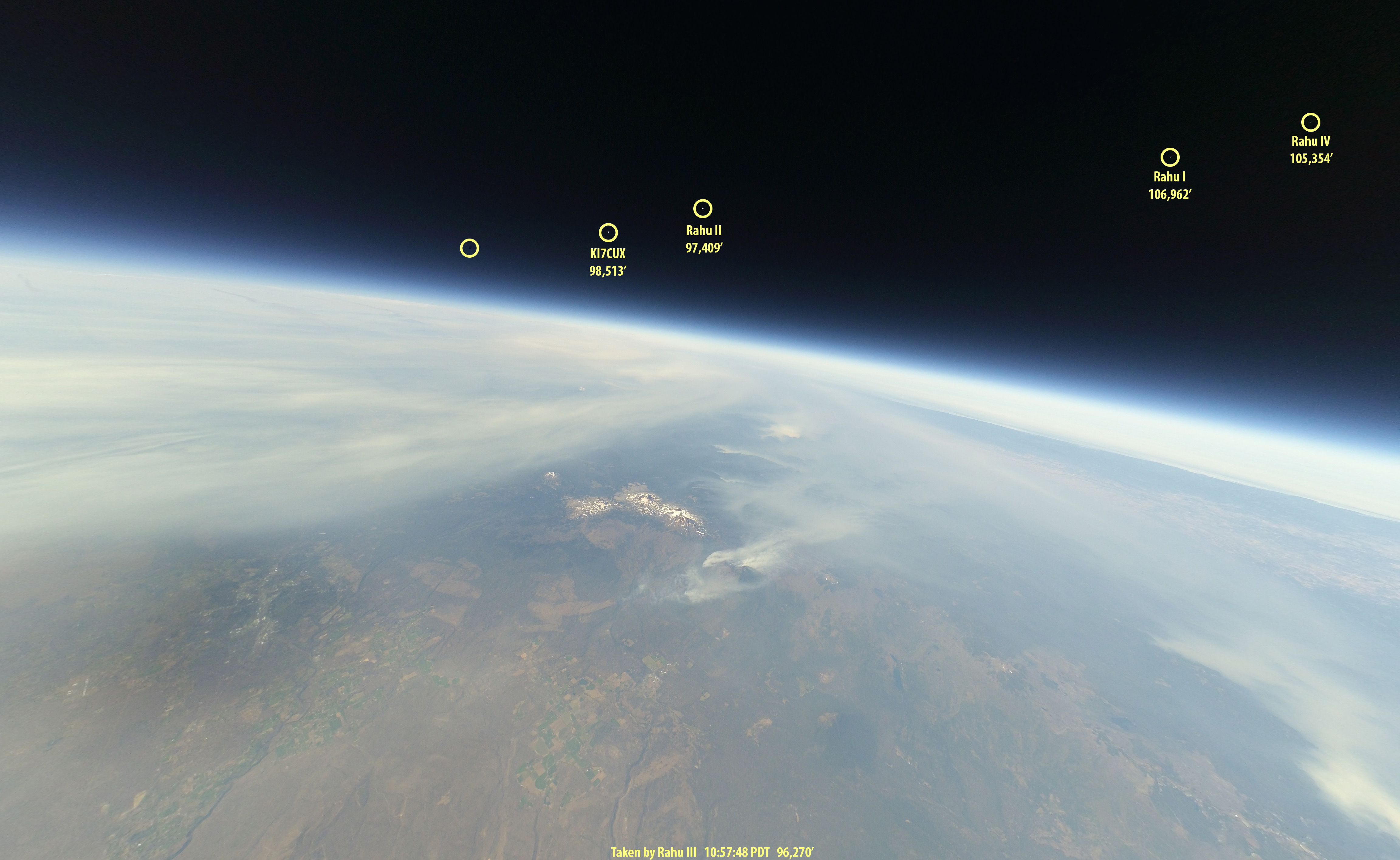
From its lower altitude at the back of the pack, the Yi camera on Rahu III was able to capture all three of our other balloons, as well as two other eclipse-day balloons.
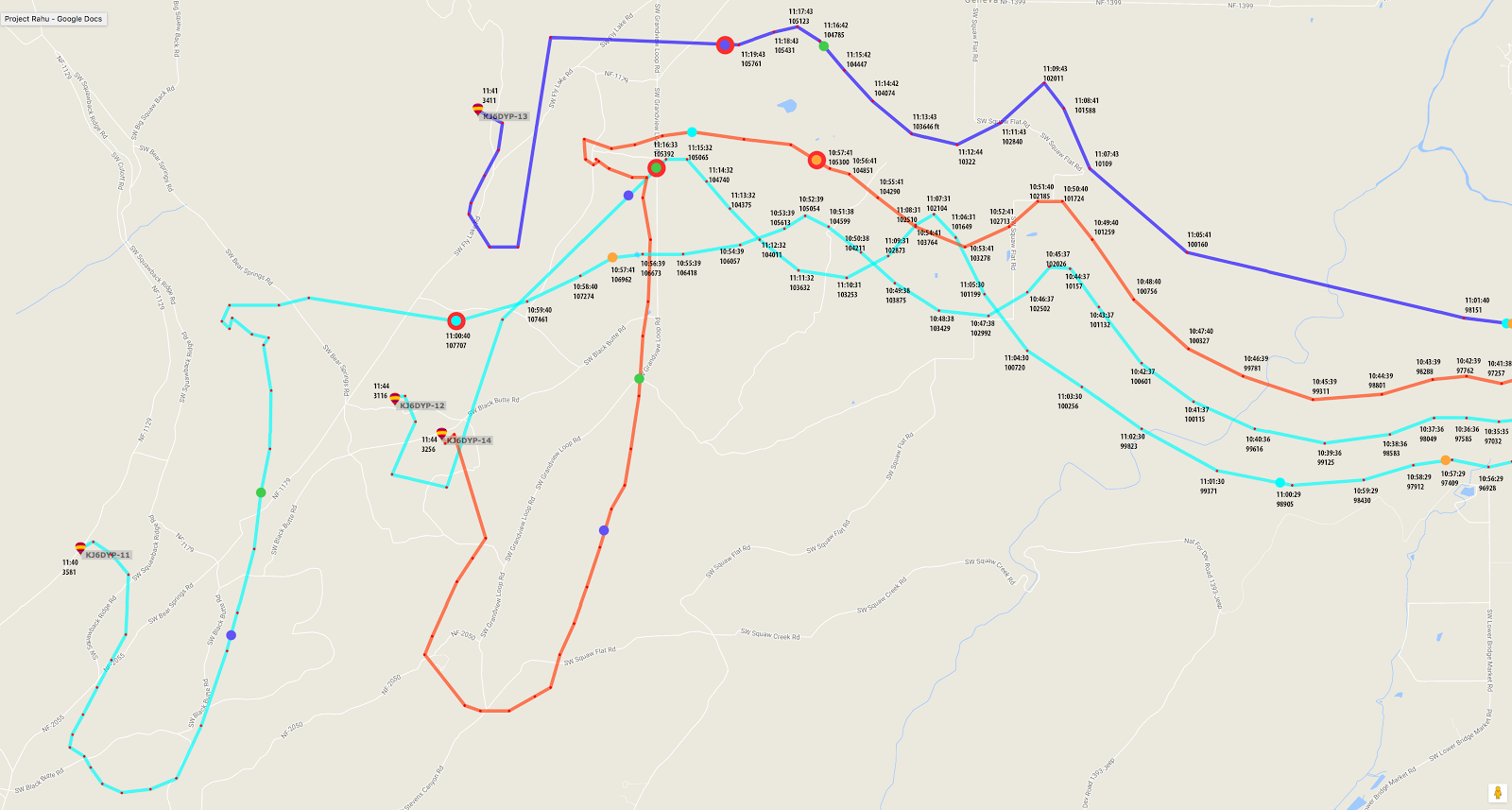
Map showing relative locations of balloons as they became large enough to see each other clearly. Red circles are burst points. Colored spots are approximate locations of balloons when others burst.
Video from Rahu III shows the balloon closest to Rahu II, sent up by TJ Eaton, KI7CUX, rising from below and suddenly blinking out above Rahu II, presumably when it burst. Unfortunately, the Rahu II cameras were not recovered. Rahu IV burst immediately after the image above was taken.
Rahu III closed to within 1.2 miles Rahu II, and took its final shots of Rahu II before the camera failed about a minute before Rahu II burst at around 105,000 feet.
 11-16.jpg)
Rahu I captured these stills showing Rahu IV’s burst from 1.5 miles away:
Recovery
Recovering all four payloads took up the remainder of Eclipse Day. Since the balloons exceeded the altitude of the test by 2300 to 4600 feet, they drifted considerably further west than predicted, landing in the Deschutes National Forest rather than farm or grassland. A number of roads were too rough to travel; other roads were private and gated, but after driving south and then back north, we were able to get within a few hundred yards of all the landing locations. At least there weren’t any traffic jams!

Rahu I landed entirely intact with the parachute having functioned correctly.
Only the Spot and Tracksoar tracking devices were located from Rahu II--a few dozen yards apart--after become separated from the cameras and parachute. Footage from Rahu III, which suffered a similar, but less catastrophic failure, suggests the looped and taped, but untied string holding the tracking end of the carbon strut came free at burst, allowing the trackers to work their way off the end. The balloon cam would also have slid off if the trackers did, but we did not locate it in a half-hour sweep of the area. The rest of the cameras, parachute, and balloon remains likely drifted further southwest.
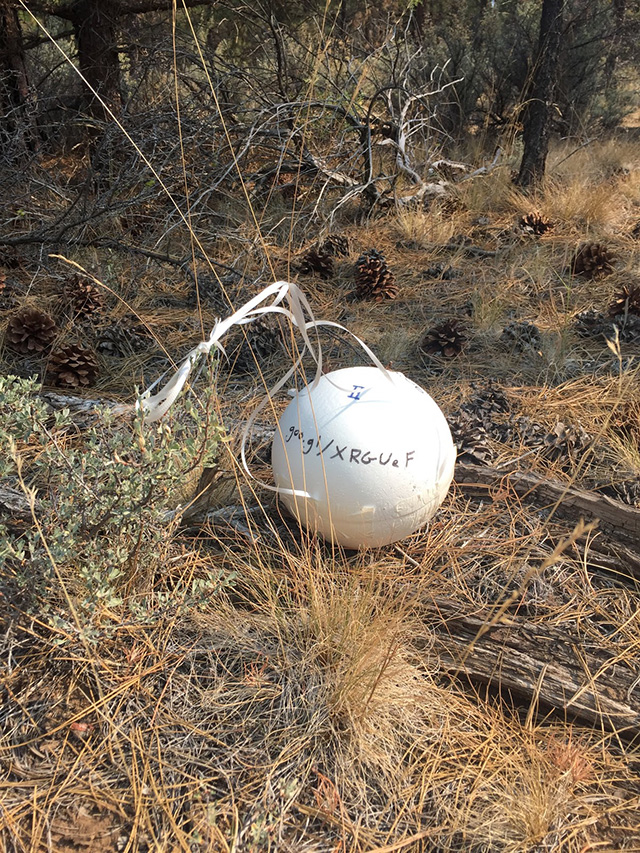
Spot 2, found without the rest of its payload.

Tracksoar 2 (with the yellow Lego stratonaut) fell not far from the Spot module.

Rahu III came apart similarly to Rahu II. The tracksoar module slid off after one of its straps broke in the turbulence of descent and was recovered a few hundred feet away. The balloon cam seemed to have come off at impact.

The balloon of Rahu III was severely tangled with the line and parachute.

David locates the tracksoar module of Rahu III after a frustrating search of the relatively small area it was transmitting from.
Rahu III fell from 20 miles in 21 minutes, even faster that the solo trackers of Rahu II and more than twice as fast as the payloads with functional parachutes. Rahu IV, on the other hand, drifted down over 47 minutes and came to rest hanging from a tree a few inches off the ground a quarter mile from where the Rahu II trackers landed.


Links we found useful